ALLAN JOEL WERNER
INLÄMNAT 2025-04-11
För koden se: github
* * * utdrag ur rapporten:
Innehållsförteckning 1. Inledning 1.2 Syfte och frågeställning 1.4 Bakgrund 1.4 Metod (förklaring av kod) 2. Undersökning 2.1 Programmering 3. Avslutning 3.1 Slutsats 3.2 Diskussion
1. Inledning
1.2 Syfte och frågeställning
Genom att programmera ett eget navigationssystem är syftet att få en bättre förståelse om hur delsystemen är uppbyggda och även få insikt i tillgängligheten av resurser inom området. Den allmänna egenskapen av navigationssystemet valdes i syftet att skapa en mall för att öka tillgängligheten av att konstruera ett navigationssystem i rymden för en skrotinsamlande farkost.
...
Hur skulle koden för ett allmänt navigationssystem i rymden för en skrotinsamlandefarkost kunna struktureras?
1.4 Bakgrund
1.4.3 Nuläget för skrotinsamling i rymden
I denna punkt kommer olika lösningsmetoder och planer angående rymdskrotinsamling i dagsläget att redogöras för. Inledningsvis lyfts ESA:s planer som inkluderar farkosten ClearSpace-1 samt ett av NASA:s koncept för en skrotinsamlande farkost. Därefter kommer den alternativa lösningen, att ta bort rymdskrot med laser, att presenteras.
ESA, den europiska rymdorganisationen, tar i ett dokument angående rymdskrotsbegränsning upp hur de riktlinjer som finns är otillräckliga för att förhindra ökningen av rymdskrot (ESA, 2023). Behovet av framsteg inom området uppmärksammas och i ESA:s ”Agenda 2025” stödjs behovet. Genom att arbeta med EU, företag av alla storlekar, uppmuntra bland annat utbildning och entreprenörskap inom området. Stödet är i form av samarbete med EU och företag, samt att uppmuntra lärare och entreprenörer. (ESA, 2021). I och med detta köpte ESA 2020 ClearSpace SA som är ett schweiziskt start-up företag. Företaget leder uppdraget ClearSpace-1 som har målet att ta ned PROBA-1 satelliten från omloppsbanan. (ESA, u.d.). NASA har även presenterat ett koncept för en skrotinsamlande farkost. Farkosten, en ADRV (Active Debris Removal Vehicle), fungerar genom att vid närmande av rymdskrot analysera dess rörelse, skapa en fångstbana, matcha dess rotationshastighet och sedan fånga objektet genom en manöver (NASA, 2021).
En alternativ metod till att samla in rymdskrot med farkost är att skjuta sönder skrotet med laser. Denna metod är endast applicerbar för mindre skrot. Den fungerar genom att rikta en laser mot objektet antingen från jordens yta eller från rymden, därefter avlägsnas delar av skrotets yta och slutligen orsakas en plasmautblåsning. Utsötningen som skapas stör skrotets omloppsbana vilket minskar skräpets livslängd. Det finns däremot nackdelar med metoden som kravet på precision och uthålliga energinivåer. (Klinkrad, 2006). Ett projekt som använder denna teknik är teleskopet Mini-EUSO. Ett av teleskopets uppdrag är att utföra ett experiment som innebär att upptäcka ett rymdskrot och sedan skjuta på det med en laserkanon. (Rymdstyrelsen, 2019).
1.5 Metod
1.5.2 Inledning Programmering
Denna del av metoden kommer att i huvudsak innefatta en redovisning och förklaring av programmets struktur. Den mest övergripande indelningen av programmet är motorn och navigationssystemet. Motorn hanterar simulationen som navigationssystemet befinner sig i samt hanterar det visuella användargränssnittet. Navigationssystemet är självaste programmet som i praktiken skulle köras på en farkost i rymden.
Inledningsvis kommer programmeringsmiljön att kortfattat beskrivas, därefter motorn och sist navigationssystemet. Motorn kan liknas med miljön runt om navigationssystemet och består av tre delar. Den första delen är rymdsimulationen som beräknar krafter och uppdaterar positioner. Den andra delen är renderaren som hanterar användargränssnittet och därmed kopplingen mellan programmet och användaren. Den sista delen är simulationen av nedlänken, vilket är kommunikationen ned till jorden. Navigationssystemet delas upp i framför allt kärnan som är navigationssystemets utgångspunkt, flygvägsbestämningen som skapar vägen för att samla in rymdskrot och sist positionsbestämning vilket behövs för skapandet av flygvägar. Navigationssystemet innehåller även en del som hanterar kommunikation och en del för interaktion med enheter som exempelvis RADAR.
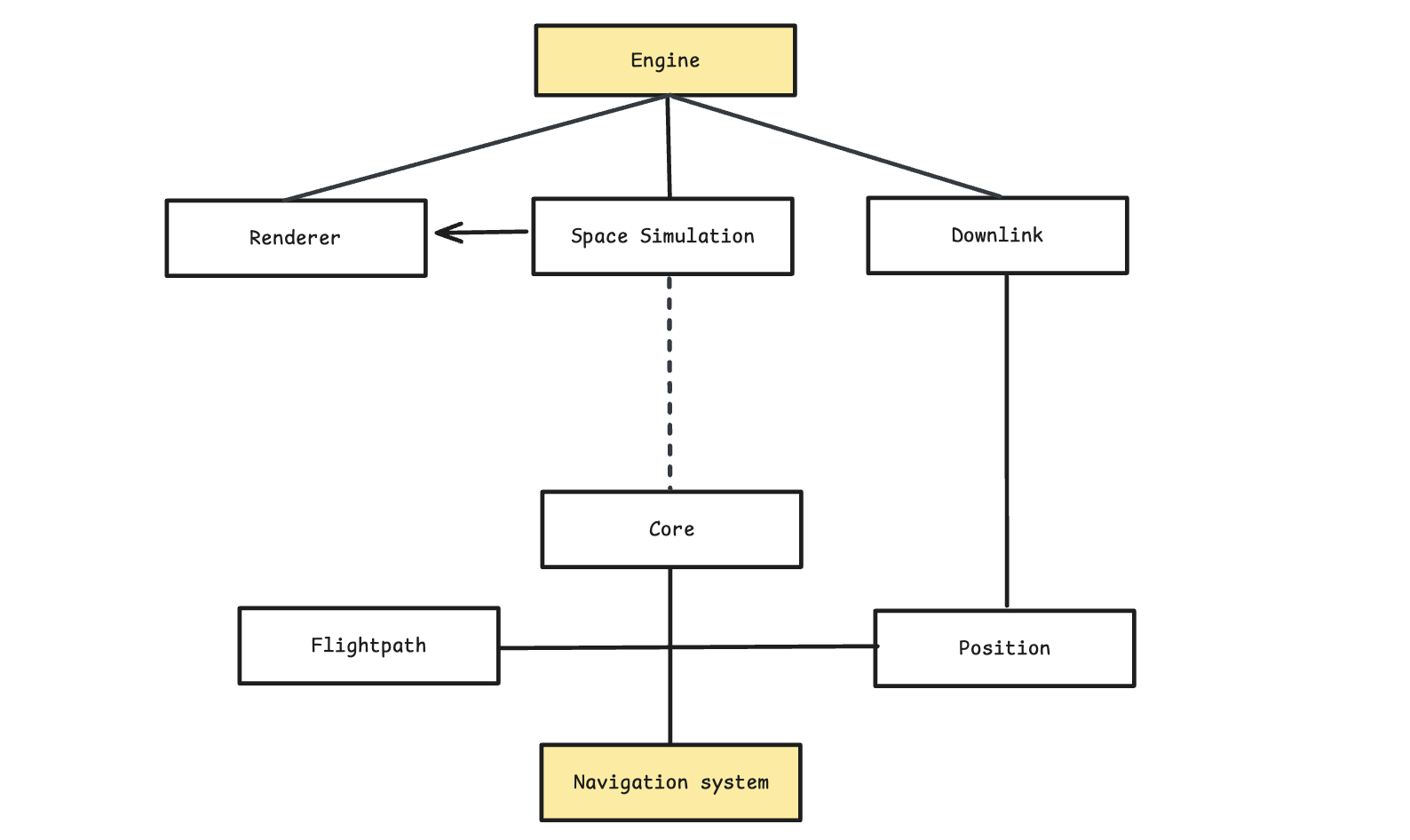
Figur 1. Diagram över den övergripande filstrukturen och interaktionen mellan motor (/src/engine/) och navigationssystem (/src/nav/).
Navigationssystemet har i huvudsyfte att fungera som en mall för praktiska applikationer medan det fortfarande ska vara operativt i simulationen. Delarna ska vara fristående ty navigationssystemet ska kunna separeras från motorn och kunna appliceras i praktiken. Programmet har även öppen källkod i syfte av användning i praktiken. Öppen källkod innebär att koden finns tillgänglig på internet och därmed för allmänheten. Den tvådelade strukturen av programmet i form av motor och navigationssystem är därmed basen för hela projektet.
Det finns även en tredje del i den övergripande strukturen som är hjälparfunktioner. Dessa funktioner är allmänna vilket innebär att de kan användas i andra funktioner över hela programmet och är inte specifika för någon del av programmet. Ett exempel på en hjälparfunktion är funktionen: ”vector_normalize()” i filen ”/src/common/vector.c” som beräknar normalen av en vektor.
För att påbörja planeringen av motorn och navigationssystemet söktes relevanta källor. NASA:s ”Basics of Spaceflight”, en webbsida skriven av Dave Doody (Doody, 2024), ger en översiktlig bild av grunderna inom rymdflygning. Sidan diskuterar olika typer av farkoster, deras komponenter och hur navigationen går till i rymden. Varav det senare är av störst intresse för denna undersökning men även tekniska specifikationer av somliga komponenter är av intresse. Den grova uppdelningen av navigationssystemet är att skapa och kontrollera flygvägar. För att skapa dessa flygvägar behövs information om farkostens position (Doody, 2024) och närliggande skrots position.
1.5.3 Programmeringsmiljö
Denna del av metoden kommer att i huvudsak innefatta en redovisning och förklaring av programmets struktur. Den mest övergripande indelningen av programmet är motorn och navigationssystemet. Motorn hanterar simulationen som navigationssystemet befinner sig i samt hanterar det visuella användargränssnittet. Navigationssystemet är självaste programmet som i praktiken skulle köras på en farkost i rymden.
1.5.4 Motor
1.5.4.1 Rymdsimulationen(src/engine/space.c)
Skapandet av motorn påbörjas innan navigationssystemet. Simulationen av rymden avgränsas till det minsta nödvändiga för att navigationssystemet ska fungera. Anledningen till avgränsningen är att simulationen inte är det huvudsakliga fokuset av undersökningen och eftersom tiden för arbetet är begränsad. Målet med rymdsimulationen är att skapa rymdskrot och sedan simulera både skrotet och den skrotinsamlande farkostens bana runt jorden. Kärnan i rymdsimulationen är en slinga som primärt uppdaterar alla positioner med Eulers Stegmetod. Slingan upprepar ett variabelt antal gånger (steg) med mellanrummet ∆t. För varje steg används en funktion för att beräkna gravitationskraften som varje objekt utsätts för vilket används för att beräkna accelerationen som därefter används för att beräkna objektets hastighet med Eulers Stegmetod genom följande:

Alla objekts, d.v.s. farkostens och rymdskrotets, initiala positioner sätts slumpmässigt i jorden LEO. För att gå i en korrekt bana runt jorden behöver även deras initiala hastigheter sättas till omloppshastigheten samt att hastigheternas riktningar behöver vara vinkelräta mot objektens positionsvektorer. För varje objekt tas hastigheten fram genom att beräkna storleken på hastighetsvektorn med formeln för omloppshastighet och därefter beräkna hastighetsvektorns riktning genom att ta kryssprodukten av positionsvektorn med en godtycklig vektor. Sist sätts objektets hastighet. Dessa beräkningar representeras i programmet på detta vis:
int r = vector_distance(position, earth_pos);
float orbital_velocity = sqrt(G * M / r);
Vector3 temp_vector = {0, 0, 1};
Vector3 velocity_direction = vector_cross_product(position, temp_vector);
velocity_direction = vector_normalize(velocity_direction);
SpaceObject temp_space_object = {
type, (Vector3) {
position.x,
position.y,
position.z},
(Vector3){
velocity_direction.x * orbital_velocity,
velocity_direction.y* orbital_velocity,
velocity_direction.z* orbital_velocity},
mass
};
1.5.4.2 Renderaren
(src/engine/renderer.c)
Det grafiska användargränssnittet är inte direkt relevant för frågeställningen, likt rymdsimulationen, utan har som mål att snabbt visualisera nödvändig information till användaren för att kunna bekräfta navigationssystemets funktion. Renderarens viktigaste funktion är att visualisera jordensomloppsbana för att kunna redogöra för positionen av rymdskrot och farkost. Denna redogörelse görs genom vyer som visar en tvådimensionell bild av två axlar.
View renderer_views[] = {
{0, 0, -1, RENDERER_SPACE_WIDTH/2, 'x', 'z'},
{1, 0, -1, RENDERER_SPACE_WIDTH, 'x', 'z'},
{2, 0, -1, RENDERER_SPACE_WIDTH, 'x', 'y'},
};
I denna lista av vyer kan ordning de befinner sig i användargränssnittet modifieras med de två första argumenten. Skalan på vyn bestäms genom det fjärde argumentet genom att ange bredden som vyn ska visa. Det tredje argumentet avgör ifall vyn ska centrera och följa något objekt, där -1 är inget objekt. I filen ”main.c” sätts den första vyn till att följa farkosten:
renderer_views[0].center_object_index = nav_spaceobjects_index;
Dessa vyer kan skapas och modifieras av användaren genom att anpassa listan samt att sätta centrering.
1.5.4.3 Nedlänken(src/engine/downlink.c)
Nedlänken är kommunikationen från farkosten upp till jorden. Målet med simulationen av nedlänken är att både skicka förfrågningar om information från farkosten, som exempelvis den aktiva flygbanan, och att ta emot och svara på förfrågningar från farkosten.
1.5.5 Navigationssystemet
Navigationssystemet styrs i grunden från kärnan där den centrala processen, alltså slingan, befinner sig. I den processen startas navigationssystemet genom att påbörja systemets huvudsakliga syfte: skapandet av en flygväg. En flygväg är den bana som navigationssystemet planerar för att ta sig till rymdskrot. Skrotet lokaliseras genom sammanställning av hämtad och samlad information. Innan rymdvägen skapas behövs positionen av farkosten i rymden vilket beräknas med information från nedlänken.
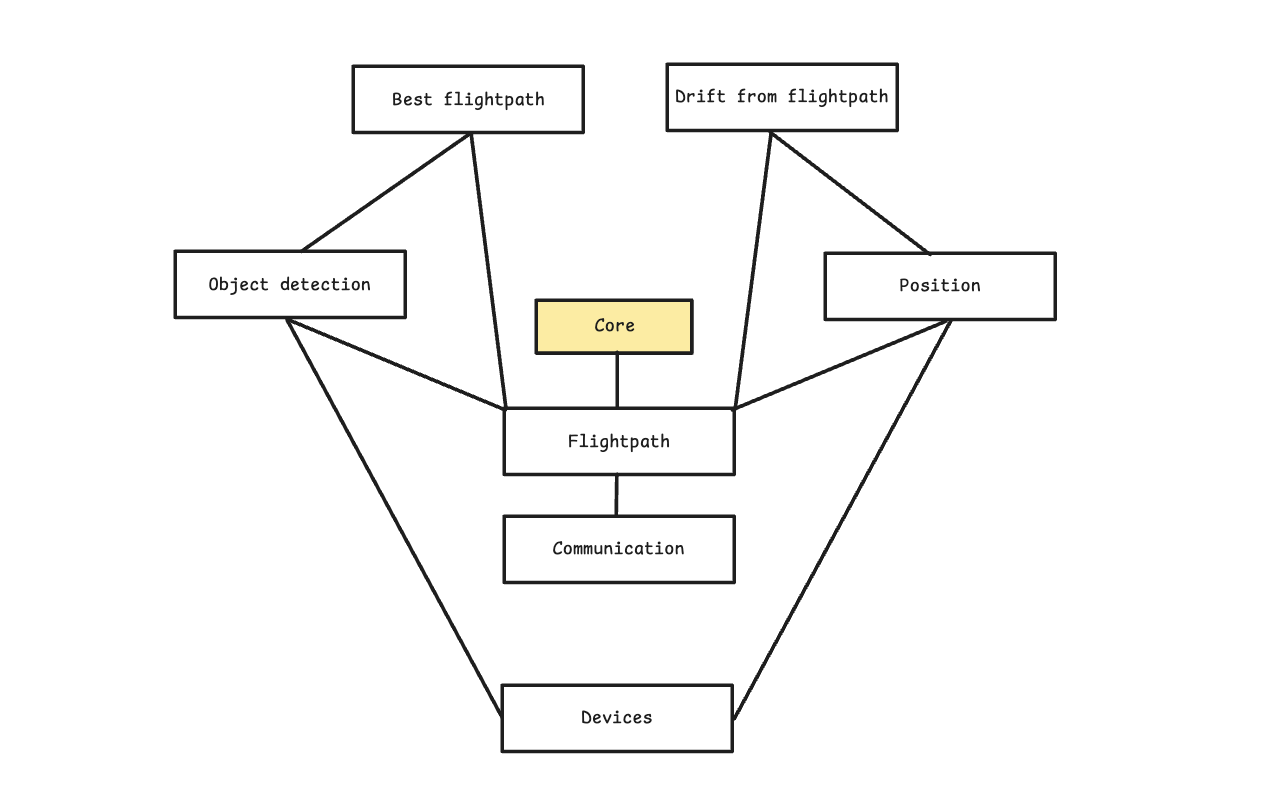
Figur 2. Diagram över den huvudsakliga interaktionen mellan navigationssystemets delar för subsystemet för flygvägsbestämnig. Flygväg, objektsdetektering, bästa flygväg och drift från flygväg sker i flight_path.c. Position bestämning sker i position.c. Kommunikation sker i communication.c och enheter hanteras i devices.c.
1.5.5.1 Navigation: Kärnan(src/nav/core.c)
Kärnan av programmet hanterar två olika delar som kategoriserar enligt följande: styra programmet genom den centrala processen och att koppla samman navigationssystemet med simulationen. Detta innebär att kärnan även är startpunkten för systemet. Kärnan hanterar då som följd avstängning av systemet samt andra basnivåfunktioner. Systemet och den interna klockan startas, och navigationssystemet kopplas samman med simulationen genom följande funktion (pseudokod):
nav_core_create() {
nav_spaceobjects_index = space_append_spaceobject();
start_time = time(NULL);
nav_core_proc_main_internal();
}
1.5.5.2 Navigation: Flygväg
(src/nav/flight_path.c)
Flygvägsdelen av programmet hanterar fyra olika delar som kategoriserar enligt följande: skapande av flygväg, lokalisering av rymdskrot, skapandet och utförande manövrar, och drift från flygväg. Främst är startpunkten för skapandet av en flygväg samt uppdatering av den flygvägen. Skapandet av en flygväg sker i två tre steg. Först avgöra farkostens egen position (1.5.4.3) sedan lokalisera närliggande skrot, och sist skapa och utföra nödvändiga manövrar. Rymdskrotets position tas reda på genom att skanna farkostens omgivning med de valda enheter som exempelvis RADAR och LIDAR.
1.5.5.3 Navigation: Position(src/nav/position.c)
Positionsdelen av programmet hanterar tre olika delar som kategoriseras enligt följande: utvärdering och förutsägelse av position, kollisionsdetektering, och förfrågning och inställning av mätdata. Utvärderingen av farkostens position inleds genom att skicka mätdataförfrågningar till nedlänken. När den förfrågade informationen anlänt från nedlänken kommer den användas för att beräkna farkostens position.
Här kommer steget från förfrågning till inställning av mätdata att beskrivas. I NASA:s ”Basic of Spaceflight” lyfts de tre viktigaste mätdata för bestämning av position i rymden. Dessa tre är farkostens avstånd från jorden, radialhastigheten och position på jordens himmel. Denna information behöver hämtas från nedlänken och sker genom att först skicka en förfrågan om informationen. Förfrågan är ett kommunikationsdatapaket som innehåller variabler för de olika mätdata och ett unikt ID samt ett förfrågnings-ID.
Paketet förs till filen ”communication.c” där den sänds vidare till transmittern i ”devices.c” . Därifrån skickas paketet till nedlänken. I nedlänken skapas ett nytt paket vars förfrågnings-ID sätts till förfrågningspaketets ID. Den förfrågade informationen läggs även in i det nya paketet. Därefter skickas paket tillbaka till ”communication.c ” i farkosten och uppdaterar informationen om den förfrågade mätdata i ”position.c”.
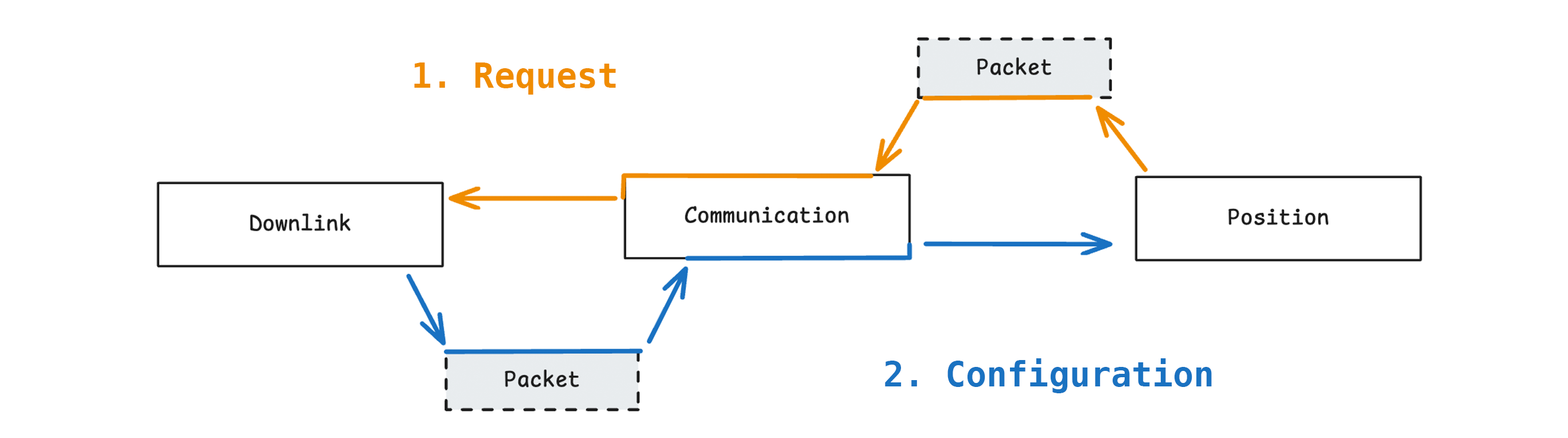
Figur 3. Diagram över förfrågning och inställning av mätdata. Informationen hämtas från nedlänken och uppdateras i programmets positionsdel (src/nav/position.c)
1.5.5.4 Navigation: Kommunikation(src/nav/communication.c)
Kommunikationsdelen av programmet hanterar i huvudsak två delar som kategoriserar enligt följande: pakethantering och kösystem för förfrågningar. Pakethanteringen består i sin tur av fyra funktioner: att skapa paket, skicka paket, ta emot paket och att lagra paket.
Paketen består av informationen som skickas mellan olika delsystem, och mellan farkosten och jorden. Det finns två typer av paket: kommunikationspaket och hälsopaket. Kommunikationspaketen används för generell kommunikation och är antingen av skickande typ, som exempelvis ett svar på en dataförfrågning, eller av mottagande typ som exempelvis manuella styrningsinstruktioner från jorden. Hälsopaketet används främst vid kontroller av fysiska enheter och innehåller information som temperatur och tryck.
2. Undersökning
2.1 Programmering
Programmeringsprojektets struktur blev i huvudsak färdig. Ett flertal system som skulle vara nödvändiga för användning i praktiken finns ej på plats som exempelvis protokoll för uppskjutning och återvändning. Det som finns är en grundläggande mall för de mest centrala delsystemen i ett navigationssystem i rymden för en skrotinsamlande farkost. Utifrån frågeställningen som lyder hur systemet endast ska struktureras och att syftet med programmet är att vara en mall, har inte flertalet delsystem implementerats och simulerats. Delsystem som strukturerats men ej implementerats är bland annat simulationer av enheter samt en algoritm för flygvägsbestämning.
Till en början var målet att undersöka hur ett allmänt navigationssystem i rymden för en skrotinsamlande farkost både skulle struktureras och fungera. Frågeställningen begränsades däremot senare till att endast undersöka hur systemet skulle struktureras. Anledningen till denna begränsning var den stora skala som projektet antog vid både strukturering och implementering av alla delar för att få hela programmet att fungera.
3. Avslutning
3.1 Slutsats
Det är möjligt att skapa ett mycket grundläggande allmänt navigationssystem i rymden för en skrotinsamlande farkost. Systemet kan struktureras genom att delas upp i huvudsakligen kärna och flygvägsbestämnig. Flygvägsbestämningen delas upp i positionsbestämning, objektsdetektering, skapandet av serier av manövrar och koppling till kommunikation och enheter.
3.2 Diskussion
3.2.1 Tillgängligheten av ett allmänt navigationssystem för skrotinsamling
I samband med ökningen av privata uppskjutningar kommer rymdskrotet att öka och för att motverka detta behöver rymdskrotet tas ned. En lösning till detta skulle kunna vara att göra det mer tillgängligt att skapa och skjuta upp skrotinsamlande farkoster för att motverka ökningen. Att skapa denna tillgänglighet består av många steg men en vital del är just navigationssystemet. Det är just här ett allmänt navigationssystem för en skrotinsamlande farkost blir viktigt och framför allt att det har lättillgänglig öppen källkod.
I skapandet av navigationssystemet för denna undersökning fanns inte mycket kod tillgänglig för jämförelse. Denna faktor hade stor påverkan på utformandet av systemet i samband med att resurser kring hur ett navigationssystem bör struktureras är gles. Den framföralla källan är NASA:s ”Basics of Spaceflight”, fast har ett sådant brett omfång att många detaljer kring just uppbyggnaden av programmet i kod och olika subsystem, går bort. Bristen på detaljerad information leder till i fallet av denna undersökning, att många egna idéer för strukturering av systemet implementeras. Att använda egna implementationer är såklart nödvändigt i alla navigationssystem då det inte finns endast ett korrekt sätt att skapa det. Problemet som uppstår är däremot att bättre lösningar för navigationssystem, från exempelvis redan skapade navigationssystem som då inte har öppen källkod, inte implementeras. Den dåliga tillgängligheten är extra problematiskt för just navigationssystem med fokus på skrotinsamling eftersom det kan minska bland annat effektiviteten av insamlingen och bränsleförbränningen genom att exempelvis ha en bättre algoritm för flygvägar.
I teorin skulle det kunna finnas ett komplext och omfattande allmänt navigationssystem för en skrotinsamlande farkost i rymden som enkelt kunde användas i praktiken. Det skulle avlägsna en viktig, tidskrävande och möjligen dyr del av att skjuta upp en skrotinsamlande farkost privat. Det lätt tillgängliga och omfattande navigationssystemet i samband med ett eventuellt bidrag skulle sammanlagt kunna kraftigt öka tillgängligheten för en privat motverkan av rymdskrot.
Dock går det att problematisera faktorer kring detta allmänna navigationssystem. Genom att skicka upp en ytterligare farkost kan öka det ej spårbara skrotet i form av mikromaterial, E.g. bränslepartiklar och färgflisor etc. Det kan även bidra till det spårbara rymdskrotet ifall farkosten slutar fungera och klassas som ”Inactive Payloads”. Problemet understryker däremot vikten av ett bra allmänt navigationssystem. Mikropartiklar skulle med ett bättre navigationssystem kunna minskas genom att optimera flygvägar på bästa sätt. Förbättringen av ett allmänt navigationssystem är även med öppenkällkod då många fler kan bidra till förbättringar. Genom att använda ett allmänt mer utvecklat system minskar även risken för systemfel som kan leda till att farkosten slutar att fungera.
4. Källor
Doody, D. (2024-10-04). Basics of Spaceflight. Hämtat från NASA: https://science.nasa.gov/learn/basics-of-space-flight/
ESA. (den 7 April 2021). Agenda 2025. Hämtat från ESA: https://www.esa.int/About_Us/Introducing_ESA_Agenda_2025
ESA. (den 30 Oktober 2023). ESSB-ST-U-007. Hämtat från ESA: https://sdup.esoc.esa.int/documents/download/ESSB-ST-U-007_Issue_1_30October2023.pdf
ESA. (u.d.). Active debris removal. Hämtat från ESA: https://www.esa.int/Space_Safety/Space_Debris/Active_debris_removal
JPL. (2009-03-03). JPL Institutional Coding Standard for the C Programming Language. Hämtat från: https://yurichev.com/mirrors/C/JPL_Coding_Standard_C.pdf
NASA. (2021). Spacecraft to Remove Orbital Debris. Hämtat från NASA: https://technology.nasa.gov/patent/MSC-TOPS-90